

Evighetsmaskiner
ABU Garcia tillverkar fiskerullar i Svängsta. Produkterna är finmekaniska, hög kvalitet och finish krävs på alla delar. ”Evighetsskruven” tillverkas i ”evighetssvarven” vars motorstyrning gjorts av Calmon.
Läs mer
Fler utmaningar vi löst
Genom åren har vi tagit oss an och löst många utmaningar. Högpresterande stegmotorstyrningar och andra motorstyrningar. Kraftelektronik, elsäkerhet och EMC. Industriell elektronik ofta med sensorsystem. Vi hjälper dig.
Läs merRörelseanalys
Rörelseanalys visar hastighet och läge på motor och mekanik. Den visar också hur dessa rör sig i förhållande till varandra och till motorns elektriska position. Att i realtid se detta gör det möjligt att förbättra prestanda. Högre acceleration, snabbare rörelser, mindre svängningar och bättre noggrannhet uppnås. Styrningen anpassas till mekaniken så att glapp, svikt och hysteres undertrycks, kraven på mekaniken minskar utan att prestanda försämras, ett kostnadseffektivare system erhålls. För stegmotorer blir det möjligt att konstruera styrningar som aldrig fasar ur eller tappar steg.
Fördelar
- Kortare utvecklingstid, färre sena omkonstruktioner
- Bättre prestanda, högre hastighet, noggrannare positionering
- Glapp, hysteres och svikt i mekaniken kan kvantifieras och hanteras
- Billigare, mindre och effektivare när motor, styrning och mekanik utnyttjas bättre
- Enklare att hitta fel i mjukvara för motorstyrning
- Förståelsen för vad som begränsar systemets prestanda ökar
Bakgrund
Att optimera stegmotorsystem utan rörelseanalys är mycket svårt. Stegmotorns moment beror av eftersläpningen mellan rotor och statorläget. När motorn stegas är det statorfältets läge som flyttas. Rotorns tröghetsmoment och magnetfältet mellan stator och rotor utgör då en svängningskrets. Last, transmission och rotorns tröghet kan bilda ytterligare svängningskretsar. En motorstyrning måste hantera dessa svängningskretsar. Bättre hantering ger snabbare och noggrannare rörelser. DC- och BLDC-motorer måste hantera lastens svängningskretsar. System med regulatorer måste anpassas till hysteres, glapp och svikt i mekaniken. Anpassning förenklas av rörelseanalys, motorns och mekanikens prestanda kan utnyttjas full ut.
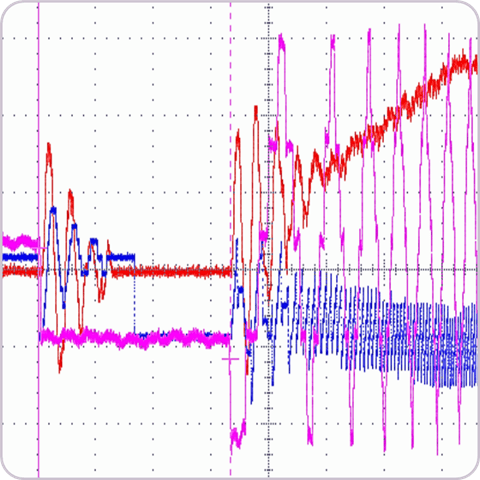
I figuren syns ström (magenta), eftersläpning (blå) och hastighet (röd) i ett verkligt fall där over-flow i en timer i vissa fall orsakade kraftiga oscillationer och ljud. Programfelet rättades enkelt när rörelseanalys visade problemets orsak. Rörelseanalys användes sen för att ändra stegtiderna så att de kraftiga oscillationerna försvann.
Princip
Mekaniska lägen (motor, last och mellanliggande steg i transmissionen) förses med givare under utvecklingsfasen. Givarna väljs så att deras inverkan på systemets rörelser kan försummas. Calmon har olika givare och fixturer för att montera givare på olika typer av motorer. Utifrån givarna beräknas hastigheter och lägen, dessa skalas till en referensaxel och kan jämföras. Differenser mellan lägen visar glapp, hysteres och svikt i det mekaniska systemet.
Drivstegets elektriska läge övervakas genom att insignaler eller strömmar mäts och avkodas, rotorns eftersläpning kan visas. I stegmotorstyrningar är eftersläpningen nyckeln till en bra rörelse.
Ett verkligt exempel
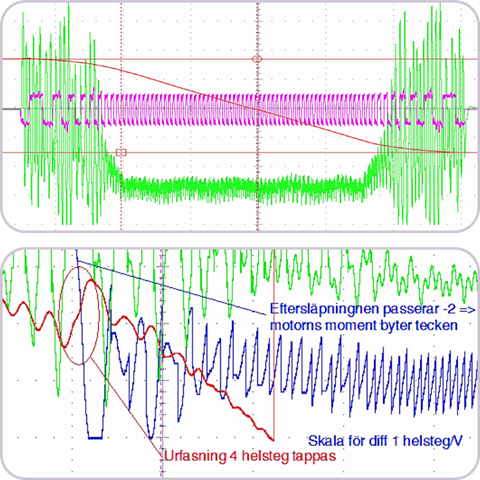
Övre bilden visar läge (röd), hastighet (grön) och en lindningsström (magenta) på en 35 mm PM-stegmotor när den rör sig i negativ riktning. Avsikten var att skapa en rörelse bestående av tre delar: en linjär acceleration, en konstant hastighet och en linjär retardation. Bilden är ett exempel på hur stegmotorers rörelser ofta ser ut om inte rörelseanalys används. Under accelerationen och retardationen svänger hastigheten mycket kraftigt, redan efter ett steg är den uppe i önskad toppfart, men sen vänder motorn och går åt fel håll med lika hög hastighet! Den stora hastighetsvariationen gjorde att motorn i vissa lägen tappade steg. I nedre bilden, där eftersläpningen också visas (blå) syns urfasningen tydligt som ett ”hack” i läget (röd). Med rörelseanalys kan stegtider justeras så att hastighetssvängningar undviks, rörelserna snabbas upp utan att steg tappas. I detta fall fick programvaran inte ändras men genom att justera motorströmmen kunde svängningarna minskas så att steg inte tappades.
Förbered för rörelseanalys
Rörelseanalys går att applicera på de flesta system. Underlätta för rörelseanalys genom att välja motorer med åtkomlig bakaxel. Någon mm utstick från motorns baksida är ännu bättre. Åtkomliga testpunkter på ingångar till drivsteg och på givarsignaler är också bra att ha.